Projects: Robust Vision
- We increase the autonomy capabilities of underwater robotic platforms.
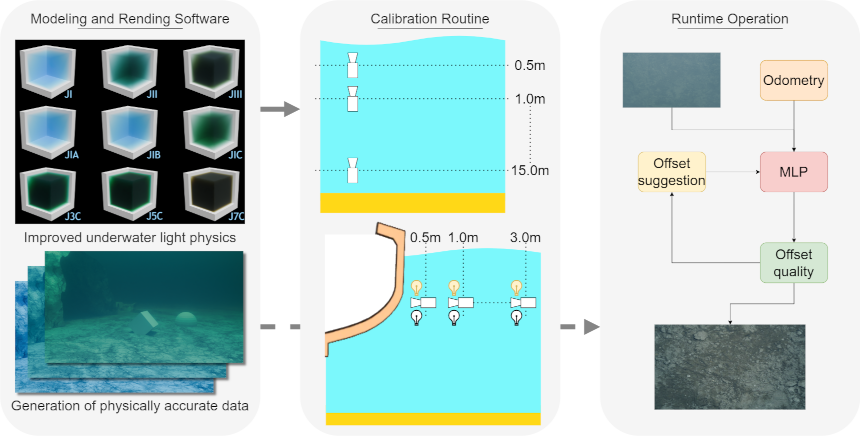
- We improve simulation of underwater imagery within the Blender modeling software, including more accurate light behaviour in water, and models of the oceans.
- We introduce a method for in-situ water column property estimation using a monocular camera and adjustable illumination.
- We design a framework providing online guidance suggestions to maintain high-quality data collection and maximise visual coverage in a broad range of water conditions.
- 3D change detection with Gaussian splatting.
- Label-free and robust to viewpoint changes between trajectories.
- New dataset of ten challenging scenes with structural and surface changes.
- Surface light field inspired regularisation to improve geometric fidelity of NeRF-based representations
- We propose a second sampling of the representation to regularise local appearance and geometry at surfaces in the scene
- Applicable to future NeRF based models leveraging reflection parameterisation
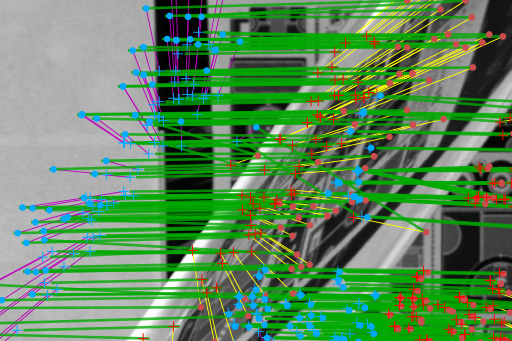
- A learned feature detector and descriptor for bursts of images
- Noise-tolerant features outperform state of the art in low light
- Enables 3D reconstruction from drone imagery in millilux conditions
- We describe the hyperbolic view dependency in Time of Flight Fields
- Our all-in-focus filter improves 3D fidelity and robustness to noise and saturation
- We release a dataset of thirteen 15 x 15 time of flight field images
- We introduce burst feature finder, a 2D + time feature detector and descriptor for 3D reconstruction
- Finding features with well defined scale and apparent motion within a burst of frames
- Approximate apparent feature motion under typical robotic platform dynamics, enabling critical refinements on hand-held burst imaging
- More accurate camera pose estimates, matches and 3D points in low-SNR scenes
- We adapt burst imaging for 3D reconstruction in low light
- Combining burst locally and feature-based methods over broad motions benefits from the strengths of each
- Allows 3D reconstructions where conventional imaging fails
- More accurate camera trajectory estimates, 3D reconstructions, and lower overall computational burden
- A new kind of feature that exists in the patterns of light refracted through objects
- Allows 3D reconstructions where SIFT / LiFF fail
- More accurate camera trajectory estimates, 3D reconstructions in complex refractive scenes
- Generalization of Richardson-Lucy deblurring to moving light field cameras
- 6-DOF camera motion in arbitrary 3D scenes
- Deblurring of nonuniform apparent motion without depth estimation
- Novel parallax-preserving light field regularization
- A linear filter that focuses on a volume instead of a plane
- Enhanced imaging in low light and through murky water and particulate
- Derivation of the hypercone / hyperfan as the fundamental shape of the light field in the frequency domain